Operating Systems
Virtualization
16 minute read
Notice a tyop typo? Please submit an issue or open a PR.
Virtualization
What is Virtualization?
In order to concurrently run diverse workloads on the same physical hardware without requiring that a single operating system be used for all of the applications, it was necessary to come up with a model where multiple operating systems can concurrently be deployed on the same hardware platform.
The solution is virtualization.
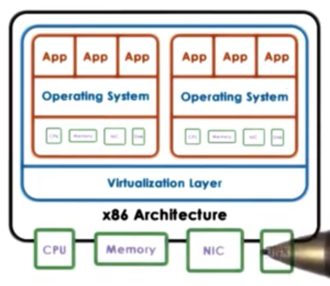
With virtualization, each of the operating systems that are deployed on the same physical platform has the illusion that it actually owns the underlying hardware resources, all or in part.
Each operating system, plus its applications and its virtual resources is called a virtual machine (VM). VMs are sometimes referred to as guests or domains.
Supporting the coexistence of multiple VMs on a single physical machine requires underlying functionality in order to deal with the allocation and management of the real hardware resources. In addition, it is necessary to provide some isolation guarantees across VMs.
This functionality is provided by the virtualization layer, also referred to as a virtual machine monitor or hypervisor.
Defining Virtualization
A virtual machine is an efficient, isolated duplicate of a real machine.
Virtualization is supported by the virtual machine monitor (VMM). The VMM has three responsibilities.
First, the VMM must provide an environment that is essentially identical to the original machine. The capacity may differ, but the overall setup (type of CPU, types of devices) should be the same. The VMM must provide some fidelity that the representation of the hardware that is visible to the VM matches the hardware that is available on the physical platform.
Second, programs that run in VMs must show at worst only minor decreases in speed. Clearly, the VMs are only given a portion of the resources available to the host machine. However, the goal of the VMM is to ensure that the VM would perform at the same speed as a native application if it were given all of the host's resources. The VMM must provide performance to the VMs that is as close to native performance as possible.
Finally, the VMM is in complete control of the system resources. The VMM controls who access which resources and when, and it can be relied upon to provide safety and isolation among the VMs.
Benefits of Virtualization
Virtualization enables consolidation. Consolidation refers to the ability to run multiple VMs on a single physical platform. Consolidation leads to fewer machines, with less space, with fewer admins, with potentially smaller electric bills that are still able to run the same degree/type of workload.
Consolidation allows us to decrease cost and improve manageability.
Virtualization also makes migration easier. Since the operating system and the applications are no longer coupled to the physical system, virtualization makes it easy to setup, teardown, and clone virtual machines.
Virtualization helps us address availability and reliability. If we notice that a physical machine is about to go down, we can easily spin up new VMs on a different physical platform.
Because the OS and the applications are nicely encapsulated in a VM, it becomes easier to contain bugs or malicious code to those isolated containers without bringing down other VMs or the entire physical platform.
Virtualization has also provided fertile ground for operating systems research. Research can quickly boot up and test OSes in development without having to restart hardware.
Virtualization also provides affordable support for legacy operating systems. Applications that need to run on older OSes no longer need a physical box dedicated just to them. They can run as one VM of many, sharing the physical resource with other applications.
Virtualization Models: Bare Metal
In bare-metal virtualization (also known as hypervisor-based or type 1 virtualization, the VMM manages all the hardware resources and support execution of VMs.
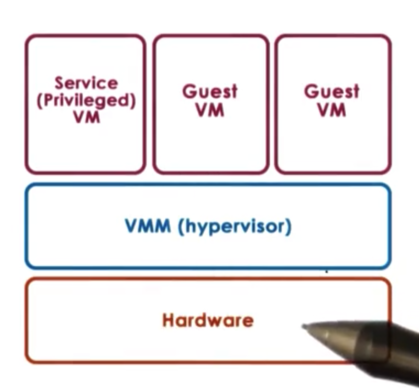
One issue with this model concerns devices. According to the model, the hypervisor must manage all possible devices. In other words, device manufacturers now have to provide device drivers not just for different operating systems, but also for different hypervisors.
To eliminate this problem, the hypervisor model typical integrates a special virtual machine, a service VM, that runs a standardized OS with full hardware access privileges, allowing it to manipulate hardware as if it were native.
The privileged VM runs all of the device drivers and controls how the devices on the platform are used. This VM will run some other configuration and management tasks to further assist the hypervisor.
This model is adapted by the Xen virtualization software and by the ESX hypervisor from VMware.
Regarding Xen, the VMs that run in the virtualized environment are referred to as domains. The privileged domain is referred to as dom0 and the guest domains are referred to as domUs. Xen is the hypervisor. All of the device drivers are running in dom0.
VMware maintains the largest share of server cores. VMware has been able to mandate that device manufactures develop drivers that can be used by the hypervisor. Since VMware targets servers, there are relatively few devices. To support the open source community, VMware has many open source APIs.
VMware used to have a control core based in Linux (similar to the dom0 in Xen), but now all of the configuration is done via remote APIs.
Virtualization Models: Hosted
The other type of virtualization model is the hosted (or type 2) model.
In this model, there is a full-fledged host OS that manages all of the hardware resources. The host OS integrates a VMM, which is responsible for providing the VMs with their virtual platform interface.
As necessary, the VMM module will invoke devices drivers and other host components as needed.
One benefit of this model is that it can leverage all of the services and mechanisms that are already developed for the host operating system. Much less functionality needs to be developed for the VMM module itself.
In this setup, you can run guest VMs through the VMM module as well as native applications directly on the host OS.
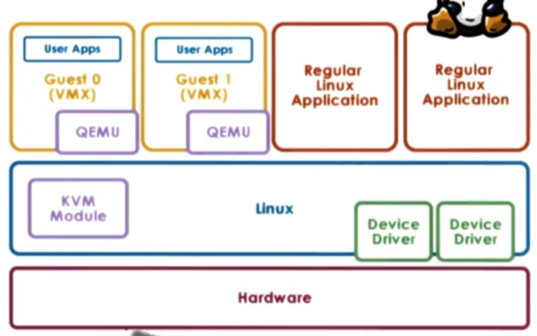
One example of the hosted model is kernel-based VM (KVM) which is built into Linux. The Linux host provides all aspects of the physical hardware management and can run regular Linux applications directly.
The support for running guest VMs comes from a combination of the KVM (VMM) module and a hardware emulator called QEMU.
QEMU is used in as a virtual interface between the VM and the physical hardware, and only intervenes during certain type of critical instructions; for example, I/O management.
KVM has been able to leverage all of the advances that have been contributed to the Linux open source community. Because of this KVM can quickly adapt to new features and fixes.
Hardware Protection Levels
Commodity hardware has more than two protection levels. For example, x86 architecture has four protection levels, called rings.
Ring 0 has the highest privilege and can access all resources and execute all hardware-supported instructions. In a native model, the operating system resides at ring 0.
In contrast, ring 3 has the least privilege. This is where the applications reside. Whenever an application tries to perform some operation for which it does not have privilege, a trap will be caused and control will be switched to ring 0.
In virtualization setups, the hypervisor sits in ring 0, pushing the OS to ring 1. The applications remain at ring 3.
More recent x86 architectures introduce two different protection modes: root and non-root. Within each mode, the four rings exist.
When running in root mode, everything is permitted. The hypervisor resides in ring 0 of the root mode. In contrast, in non-root mode, certain types of operations are not permitted. Guest VMs operate in non-root mode, with their applications in ring 3 of this mode, and their OS in ring 0.
Attempts by the guest OS to perform privileged operations cause traps called VMExits, which trigger a switch to root mode, passing control to the hypervisor. When the hypervisor completes its operation, it passes control back to the virtual machine, by performing a VMEntry, which switches out of root mode.
Processor Virtualization
Guest instructions are executed directly by the hardware. The VMM does not interfere with every instruction that is issued by the guest OS or its applications.
As long as the guest OS is operating within the resources allocated to it by the hypervisor, the instructions will operate at hardware speeds, which will underline the efficiency of the virtualization solution.
Whenever a privileged instruction is issued, the processor causes a trap to the hypervisor. At this point, the hypervisor can determine if the operation is to be allowed or not. If the operation is illegal, the hypervisor can perform some punitive action, like shutting down the VM. If the operation should be allowed, the hypervisor must provide the necessary emulation to ensure that the guest OS receives the response it was expecting from the hardware. This is known as the trap-and-emulate strategy.
The hypervisor intervention must be invisible to the guest OS.
x86 Virtualization in the Past
Before 2005, x86 platforms had only the four privilege rings, without the root/non-root distinction. The basic strategy for virtualization software was to run the hypervisor in ring 0, and the guest operating system in ring 1.
However, there were exactly 17 hardware instructions that were privileged (required ring 0), but didn't cause a trap. Issuing them from another protection level wouldn't pass control to the hypervisor, but would just fail silently.
For example, enabling/disabling interrupts requires manipulating a bit in a privileged register, which can be done with the POPF/PUSHF instructions. When these instructions were issued, they just failed silently.
Since control isn't passed to the hypervisor, the hypervisor has no idea that the OS wanted to change the interrupt status, so it cannot emulate that behavior.
At the same time, since the failure was silent, the OS doesn't know about it and assumes the change was successful. As a result, it continues with its execution.
Binary Translation
One way to solve the issue of the 17 hardware instructions was to write the VM binary to never issue those 17 instructions. This process is called binary translation.
The goal pursued by binary translation is to run unmodified guest operating systems. We shouldn't need to install additional software or policies to alter the guest OS in order to run in a virtualized environment. When the guest OS is not modified, this type of virtualization is called full virtualization.
To avoid these bad hardware instructions, some interception and translation must take place at the virtualization layer. Instruction sequences - typically at a function-level granularity - that are about to be executed are captured from the VM binary. This needs to be done at runtime, dynamically, because the execution of the instruction sequences may depend on code passed in at runtime.
The first step involves capturing and inspecting code blocks that are about to be issued to see if any of the 17 hardware instructions are present.
If the code block does not have one of these instructions, the block is marked as safe and allowed to execute at hardware speeds.
However, if one of the bad instructions is found, that instruction is translated into some alternate instruction sequence that still emulates the desired behavior.
Binary translation adds overheads! Mechanisms to reduce these overheads include caching translated code fragments and making sure to only analyze kernel code executed in the guest OS.
This approach was taken by VMware.
Paravirtualization
Another approach gives up on unmodified guests, instead focusing on performance. In contrast to full virtualization, this is called paravirtualization.
In paravirtualization, the guest now knows that it is running in virtualized environment on top of a hypervisor as opposed native physical resources.
A paravirtualized guest OS may not directly try to perform operations that it knows will fail, but will instead make explicit calls to the hypervisor to achieve the desired behavior. These calls are called hypercalls and they behave similar to system calls. The hypercall will trap to the hypervisor which, upon performing the required operation with the data supplied by the guest, will pass control back to the guest.
This approach was taken by Xen.
Memory Virtualization: Full Virtualization
For full virtualization, a key requirement is that the guest OS continues to observe a contiguous, linear address space that starts from address zero. This is what an operating system would see if it actually owned the physical memory.
To achieve this, we need to distinguish among three types of addresses: virtual addresses, physical addresses, and machine addresses.
Virtual addresses are used by the applications in the guest. Physical addresses are used by the kernel of the guest. Machine address correspond to the physical addresses on the underlying physical platform.
The guest OS makes mappings of virtual addresses to the physical addresses that it thinks it owns. Underneath, the hypervisor maintains a mapping of the physical addresses to the machine addresses. "Contiguous" physical addresses can map to discontiguous machine addresses.
In effect, there are two page tables: one maintained by the guest OS, and one maintained by the hypervisor.
At the hardware level, the MMU and TLB help with the address translation process and free us from having to implement these translations in software.
In this setup, the first address translation exists solely in software, and the second translation can potentially leverage hardware components.
This is too expensive since this will add overhead on every memory reference.
Another option is for the hypervisor to maintain a shadow page table. In the shadow page table, the hypervisor re-maps the virtual addresses to machine addresses, without considering the physical addresses.
The hypervisor will clearly have to maintain consistency between these two pages tables. The hypervisor will have to make sure to invalidate the shadow page table on context switch.
It will also have to make sure to write protect the page table in order to keep track of new mappings. The write protection is necessary to ensure that whenever the guest tries to establish new address mappings, it will trap into the hypervisor. During the trap, the hypervisor can update its shadow page table.
Memory Virtualization: Paravirtualization
Since an OS knows that it is in a virtualized environment in paravirtualization, it is no longer a strict requirement that the guest OS uses contiguous physical memory starting at 0.
The guest OS can explicitly register its page tables with the hypervisor, so there is no need for two page tables.
The guest still doesn't have write permissions to this page table - which is now used directly by the hardware - as this would allow as guest to potentially corrupt another guest by overwriting its memory.
Because of this, every write to the page table will cause a trap to the hypervisor. However, since the guest is paravirtualized, we can modify the guest to batch page table updates into a single hypercall, amortizing the cost of the VM exit across multiple updates.
Many of the overheads associated with memory virtualization in both full and paravirtualization have been reduced by improvements on newer hardware platforms.
Device Virtualization
When we talk about CPU/Memory virtualization, certain things are relatively less complicated because there is a significant level of standardization at the instruction set architecture (ISA) level across different platforms.
From a virtualization standpoint, we know that we have to support a specific ISA and we don't care if there are lower level differences between the hardware because it is up to the hardware manufacturers to be standardized at the ISA level.
This is the case for a specific ISA like x86.
When we look at devices, there is a much greater diversity in the type of devices. Also, there is a lack of standardization when it comes to the specifics of the device interface and the semantics of that interface.
To deal with this diversity, virtualization solutions adapt one of three key models to virtualize devices.
Passthrough Model
In the passthrough model, the VMM-level driver is responsible for configuring the access permissions to a device. For example, it will allow a guest VM to have access to the memory registers corresponding to a device.
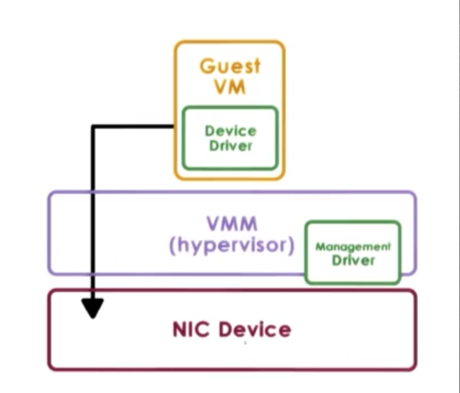
In this approach, the guest VM has exclusive access to a device. In addition, the VM can directly access the device, without interacting with the VMM. This model is also called the VMM-bypass model.
The problem with this exclusive access is that is making sharing devices across VMs difficult. The hypervisor will need to continuously reassign who the device belongs to over time, and device access will not happen concurrently across VMs. This is often unfeasible.
Because the hypervisor is completely out of the way, the guest VM and the device driver in the guest VM directly operate on and control the device. This means that there needs to be a device of the exact same type on the physical platform that the guest OS expects.
One of the benefits of virtualization is that the guest VMs are decoupled from the physical hardware, which makes migration of guests across physical nodes easy.
This passthrough model breaks that decoupling as it binds a device to a VM. This reintroduces migration complexity as there may be some device specific/resident state that would need to be properly copied and configured to a destination mode.
Hypervisor Direct Model
In the hypervisor-direct model, the hypervisor intercepts every device access request that is performed by the guest VM.
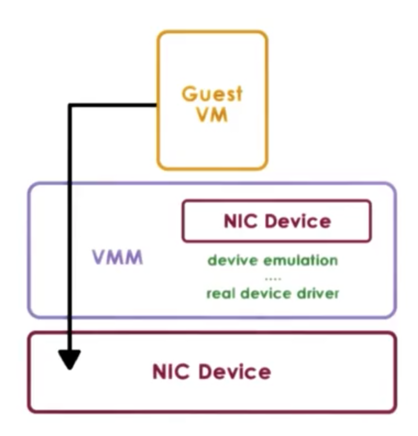
The hypervisor no longer has the constraint that the requested device and the physical device match.
Instead, the hypervisor can translate the device access request to some generic representation of an I/O operation for that particular family of devices - network or disk, for example - and then traverse the hypervisor resident I/O stack. The bottom of that stack is the actual real device driver, which the hypervisor will finally invoke to fulfill the request.
A key benefit of this approach is that the VM remains decoupled from the physical platform/device. As a result, migration remains easy. In addition, device sharing can now occur since device access is managed by the hypervisor.
The downside of the model is that the device emulation step adds latency to device accesses. As well, this model requires that the hypervisor supports all of the drivers so it can perform the necessary emulations, which means that the hypervisor is now exposed to all of the complexities and complications of various device drivers.
Split Device Driver Model
In the split device driver model, all of the devices accesses are controlled in a way that involves a component that resides in a guest VM and a component that resides in a hypervisor layer.
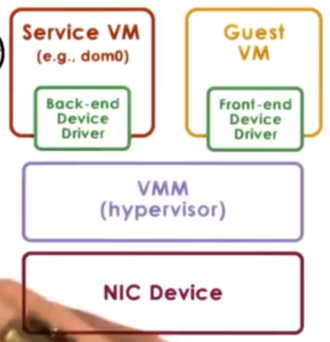
The front-end driver resides in the guest VM and the actual driver for the physical device - the back-end driver - resides in the service VM (or the host in type 2 virtualization).
Although the back-end driver doesn't necessarily have to be modified, as it is the same driver that the OS would use as if it were running natively, the front-end driver does need to be modified.
The front-end driver needs to take the device operations that are made by the applications in the guest, and then wrap them in a standard format to be delivered to the back-end component. Because of this modification, this model can only really be used in paravirtualized guests.
One benefit of this approach is that the device emulation overhead can be eliminated. Another benefit of this approach is that the centralized back-end component allows for better management of shared devices.
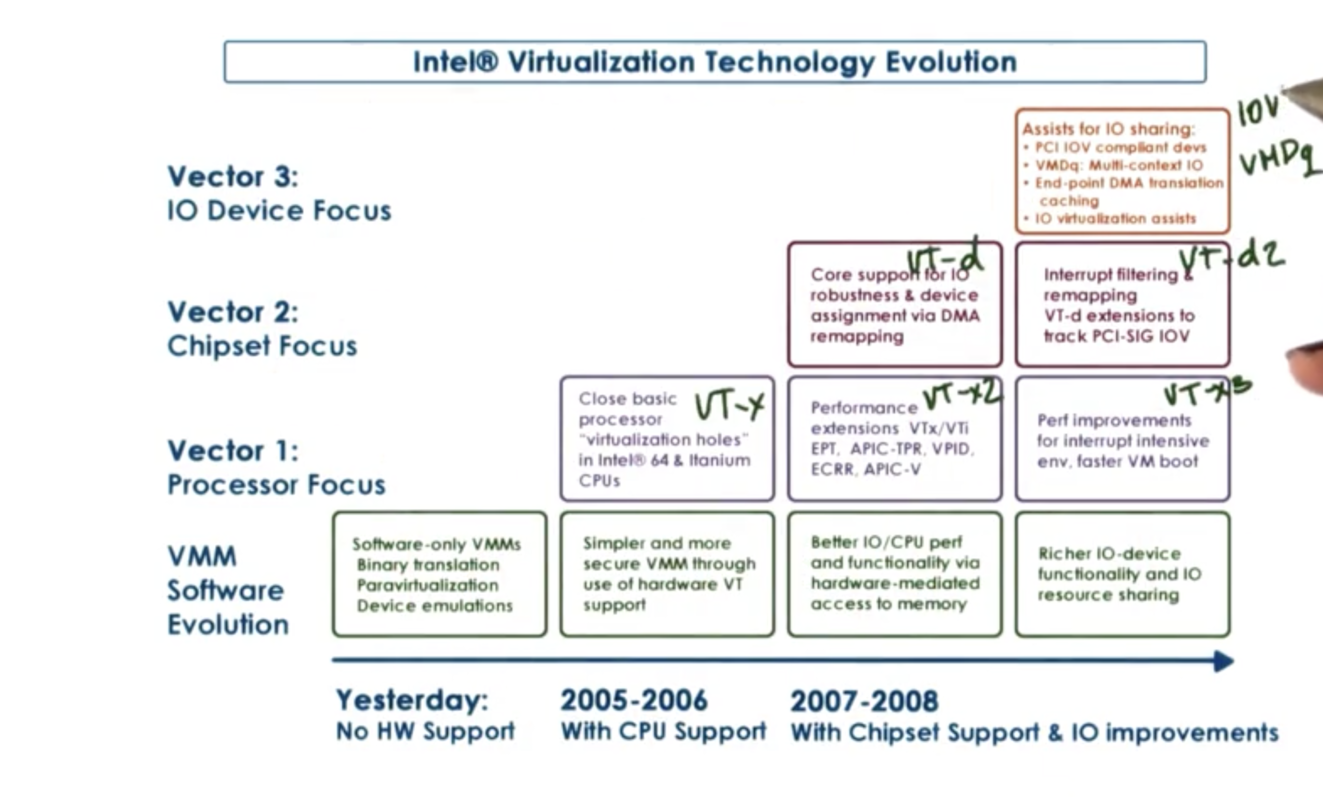
Hardware Virtualization
In the x86 world, the two virtualization-friendly architectures are the AMD Pacifica architecture and the Intel Vanderpool Technology architecture, both created circa 2005.
One of the first things that was fixed was to close the holes with the 17 non-virtualizable hardware instructions so that they will cause a trap and pass control over to the hypervisor in privileged mode.
Also, the new protection mode was introduced. Now, there was a "root" and "non-root" mode (also known as "host" and "guest", respectively).
Support was added for the hardware processor to interpret the state of the virtual processors (or vCPUs). This information is captured in a VM control block. The hardware understands how to "walk" this data structure, and can specify whether or not a system call should trap.
Once hardware was able to detect the presence of different VMs, the next step was to tag the memory structures used by the hypervisor with the different VM identifiers.
This led to support for extended page tables and tagged TLBs, both of which incorporated VM identifiers. This makes context switches by VMs (also called world switches) more efficient, because the page tables and TLBs no longer had to be flushed.
Hardware was also extended to add better support for I/O virtualization, which included modifications to the processor and chipset. Some examples of these extensions were multiqueue devices (think of a single devices having multiple logical interfaces that can be used by multiple VMs) as well as better interrupt routing so that the core on which the VM is running is actually the core that gets interrupted.
Other features were added for better security and management support.
Finally, a number of new instructions were added to x86 in order to implement these new features. For example, a new instruction was added to allow switching into new protection mode.
x86 VT Revolution
OMSCS Notes is made with in NYC by Matt Schlenker.
Copyright © 2019-2023. All rights reserved.
privacy policy